引言
在对图节点进行表示学习中,一般方法本质上是 Transductive【直推式】,不能自然地泛化到未见过的节点。本文介绍的 GraphSAGE 是一个 Inductive【归纳式】的框架,通过从一个节点的局部邻居采样并聚合节点特征,即利用节点特征信息(比如文本属性)来高效地为未见过的节点生成 Embedding。
基本思路
GraphSAGE 不是试图学习一个图上所有节点的 Embedding,而是学习一个为每个节点产生 Embedding 的映射,学习一个节点的信息是如何通过其邻居节点的特征聚合而来,学习到了这样的”聚合函数“。该方法学到的节点 Embedding 是根据节点邻居关系的变化而变化,如果旧节点建立了一些新的边,其对应的 Embedding 也会进行相应变化。
流程
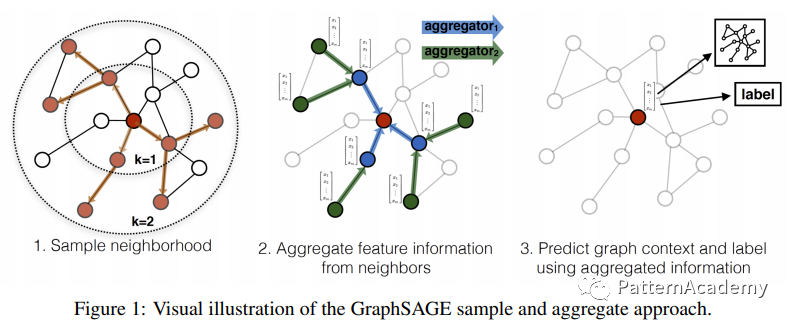
GraphSAGE是Graph SAmple and aggreGatE 的缩写,从名称上也看出了该方法的大致过程:
- 对目标节点的邻居进行采样(采样为固定数量,如果不足就采取有放回的采样;
- 根据选择的聚合函数聚合邻居节点蕴含的信息;
- 得到目标节点的向量表示后进行下游任务(比如:分类任务)
算法
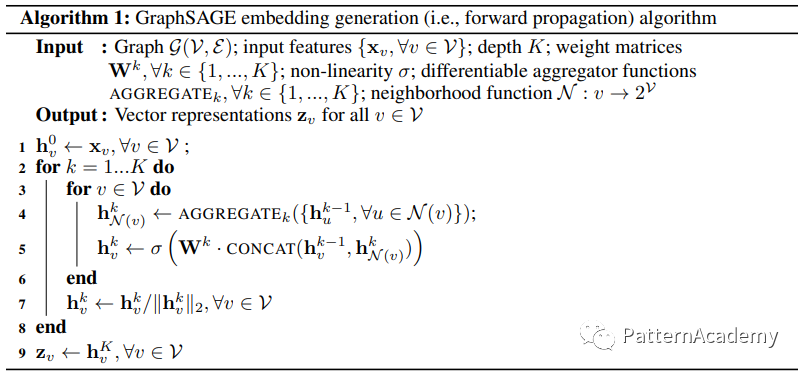
GraphSAGE 的前向传播描述了如何使用聚合函数对节点的邻居信息进行聚合,从而生成节点 Embedding ,算法如下:
- 设置网络的层数K,也代表着每个节点能够聚合的邻接点的跳数
- 循环处理每个节点V,把节点的特征向量作为输入
- 聚合k−1层(可以理解为比当前层更外一层)中节点v的邻居节点u的 Embedding
- k层节点v的特征表示为k-1层节点v特征和上步聚合邻居节点的特征进行合并(求和)
- 每一层操作完后进行归一化操作
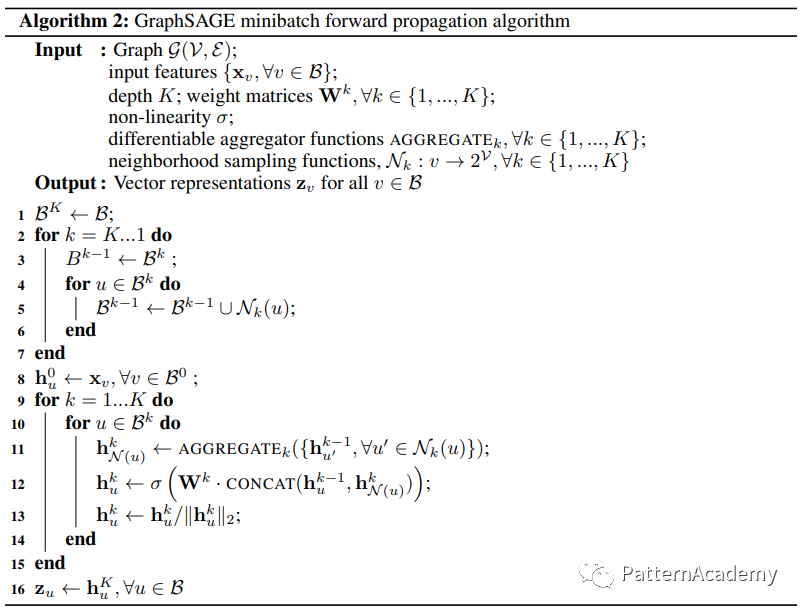
- 使用 Minibatch 方式伪代码如下:
使用 DGL 框架的一个代码示例:
# 通过sampler来完成邻居几跳和个数采样,设置为第一跳25,第二跳10
sampler = dgl.dataloading.MultiLayerNeighborSampler([10,25])
dataloader = dgl.dataloading.NodeDataLoader(G,
ids,
sampler,
batch_size=5000,
shuffle=False,
drop_last=False,
num_workers=4)
# 通过dataloader来按照节点批次处理,下面为每次10000个节点,并获取它的二跳子图(blocks)
for step, (input_nodes, output_nodes, blocks) in enumerate(dataloader):
# [Block(num_src_nodes=30840, num_dst_nodes=13708, num_edges=37639), Block(num_src_nodes=13708, num_dst_nodes=10000, num_edges=3886)]
blocks = [block.int().to(device) for block in blocks]
batch_inputs = nfeat[input_nodes].to(1)
# tensor([ 0, 1, 2, ..., 9997, 9998, 9999])
print(output_nodes)
# 定义SAGE模型,可以定义多层网络
class SAGE(nn.Module):
def init(self, in_feats, n_hidden, n_classes, n_layers, activation, dropout):
self.layers = nn.ModuleList()
if n_layers > 1:
self.layers.append(dglnn.SAGEConv(in_feats, n_hidden, 'mean'))
for i in range(1, n_layers - 1):
self.layers.append(dglnn.SAGEConv(n_hidden, n_hidden, 'mean'))
self.layers.append(dglnn.SAGEConv(n_hidden, n_classes, 'mean'))
else:
self.layers.append(dglnn.SAGEConv(in_feats, n_classes, 'mean'))
self.dropout = nn.Dropout(dropout)
self.activation = activation
def forward(self, blocks, x):
h = x
for l, (layer, block) in enumerate(zip(self.layers, blocks)):
# 把最外层的邻居集合和节点特征输入到SAGEConv完成聚合
# SAGEConv具体操作为:
# graph.update_all(msg_fn, fn.mean('m', 'neigh'))
# h_neigh = graph.dstdata['neigh']
# rst = self.fc_self(h_self) + h_neigh
# rst = self.activation(rst) # activation
# rst = self.norm(rst) # normalization
# 由外到内迭代,外层的输出作为内层的输入
h = layer(block, h)
if l != len(self.layers) - 1:
# 最后一层不用进行激活操作了,输出直接就可以作为节点表示
h = self.activation(h)
h = self.dropout(h)
return h
聚合函数
GraphSAGE 提供了四种聚合邻居节点的函数:
Mean aggregator:对节点v邻居节点的特征向量求均值
\[\mathbf{h}_{v}^{k} \leftarrow \sigma\left(\mathbf{W} \cdot \operatorname{MEAN}\left(\left\{\mathbf{h}_{v}^{k-1}\right\} \cup\left\{\mathbf{h}_{u}^{k-1}, \forall u \in \mathcal{N}(v)\right\}\right)\right.\]GCN aggregator:对节点使用卷积方式聚合(具体参见 GCN 论文)
\[\begin{align*} \text { aggregate }\left(X_{i}\right) &=\hat{D}^{-0.5} \hat{A} \hat{D}^{-0.5} X \\ &=\sum_{k=1}^{N} \hat{D}_{i k}^{-0.5} \sum_{j=1}^{N} \hat{A}_{i j} X_{j} \sum_{l=1}^{N} \hat{D}_{i l}^{-0.5} \\ &=\sum_{j=1}^{N} \hat{D}_{i i}^{-0.5} \hat{A}_{i j} X_{j} \hat{D}_{j j}^{-0.5} \\ &=\sum_{j=1}^{N} \frac{1}{\hat{D}_{i i}{ }^{0.5}} \hat{A}_{i j} \frac{1}{\hat{D}_{j j}{ }^{0.5}} X_{j} \\ &=\sum_{j=1}^{N} \frac{\hat{A}_{i j}}{\sqrt{\hat{D} i i \hat{D} j j}} X_{j} \end{align*}\]Pooling aggregator:首先对目标节点的邻居节点的Embedding向量进行一次非线性变换,然后进行一次Pooling操作(max pooling or mean pooling)
\[AGGREGATE_{k}^{\text {pool }}=\max \left(\left\{\sigma\left(\mathbf{W}_{\text {pool }} \mathbf{h}_{u_{i}}^{k}+\mathbf{b}\right), \forall u_{i} \in \mathcal{N}(v)\right\}\right)\]LSTM aggregator:使用LSTM来增强表达能力,因为LSTM模型涉及到节点排序,所以在使用时需要对节点进行排序处理后才能输入LSTM模型
使用 DGL 框架的一个代码示例:
if self._aggre_type == 'mean':
graph.srcdata['h'] = self.fc_neigh(feat_src) if lin_before_mp else feat_src
# 使用平均算子对邻居节点特征进行操作
graph.update_all(msg_fn, fn.mean('m', 'neigh'))
h_neigh = graph.dstdata['neigh']
elif self._aggre_type == 'gcn':
check_eq_shape(feat)
graph.srcdata['h'] = self.fc_neigh(feat_src) if lin_before_mp else feat_src
if isinstance(feat, tuple): # heterogeneous,可以处理二分图
graph.dstdata['h'] = self.fc_neigh(feat_dst) if lin_before_mp else feat_dst
else:
if graph.is_block:
graph.dstdata['h'] = graph.srcdata['h'][:graph.num_dst_nodes()]
else:
graph.dstdata['h'] = graph.srcdata['h']
graph.update_all(msg_fn, fn.sum('m', 'neigh')) # 对邻居节点特征求和
# divide in_degrees,除以入度操作
degs = graph.in_degrees().to(feat_dst)
h_neigh = (graph.dstdata['neigh'] + graph.dstdata['h']) / (degs.unsqueeze(-1) + 1)
elif self._aggre_type == 'pool':
# 添加了一个pool层,做非线性变换
graph.srcdata['h'] = F.relu(self.fc_pool(feat_src))
# 使用max操作
graph.update_all(msg_fn, fn.max('m', 'neigh'))
h_neigh = self.fc_neigh(graph.dstdata['neigh'])
elif self._aggre_type == 'lstm':
graph.srcdata['h'] = feat_src
# 做LSTM操作
graph.update_all(msg_fn, self._lstm_reducer)
h_neigh = self.fc_neigh(graph.dstdata['neigh'])
参数学习
GraphSAGE 是可以使用有监督学习和无监督学习两种方式:
有监督学习:监督学习形式根据任务的不同可以直接设置目标函数即可,如最常用的节点分类任务使用交叉熵损失函数
使用 DGL 框架的一个代码示例:
for epoch in range(args.n_epochs):
model.train()
if epoch >= 3:
t0 = time.time()
# forward
logits = model(g, features)
# 直接使用交叉熵损失即可
loss = F.cross_entropy(logits[train_nid], labels[train_nid])
optimizer.zero_grad()
loss.backward()
optimizer.step()
无监督学习:采用负采样的方法,然后通过比较相邻节点相似度高于非相邻节点相似度
\[J \mathcal{G}\left(\mathbf{z}_{u}\right)=-\log \left(\sigma\left(\mathbf{z}_{u}^{T} \mathbf{z}_{v}\right)\right)-Q \cdot \mathbb{E}_{v_{n} \sim P_{n}(v)} \log \left(\sigma\left(-\mathbf{z}_{u}^{T} \mathbf{z}_{v_{n}}\right)\right)\]说明:
- 节点v是节点u的“邻居”
- Pn是负采样的概率分布
- Q是负采样的个数
- 通过点积来计算节点相似度
使用 DGL 框架的一个代码示例:
# 负采样方法,根据与节点的度的幂成正比的概率分布对负样本目标节点进行采样
class NegativeSampler(object):
def __init__(self, g, k, neg_share=False):
self.weights = g.in_degrees().float() ** 0.75 # 缓存概率分布
self.k = k # 采样个数
self.neg_share = neg_share # 是否共享负采样node到不同Positive节点中
def __call__(self, g, eids):
src, _ = g.find_edges(eids)
n = len(src)
if self.neg_share and n % self.k == 0:
dst = self.weights.multinomial(n, replacement=True)
dst = dst.view(-1, 1, self.k).expand(-1, self.k, -1).flatten()
else:
dst = self.weights.multinomial(n*self.k, replacement=True)
src = src.repeat_interleave(self.k) # 重复交错
return src, dst
# 无监督方法定义的损失函数
class CrossEntropyLoss(nn.Module):
def forward(self, block_outputs, pos_graph, neg_graph):
with pos_graph.local_scope():
pos_graph.ndata['h'] = block_outputs
# 使用点积来计算两节点相似度,这里Postive中认为邻居节点相似度高
pos_graph.apply_edges(fn.u_dot_v('h', 'h', 'score'))
pos_score = pos_graph.edata['score']
with neg_graph.local_scope():
neg_graph.ndata['h'] = block_outputs
# 这里Negative中认为非邻居节点相似度低
neg_graph.apply_edges(fn.u_dot_v('h', 'h', 'score'))
neg_score = neg_graph.edata['score']
score = th.cat([pos_score, neg_score])
label = th.cat([th.ones_like(pos_score), th.zeros_like(neg_score)]).long()
# 通过二分类的交叉熵损失
loss = F.binary_cross_entropy_with_logits(score, label.float())
return loss
引用
[2] DGL 官网
[3] GraphSAGE 论文